
Panduan Memahami Fungsi & Kemampuan Sensor LiDAR
Tujuan dari blog ini (yang pertama dari seri dua bagian) adalah untuk menjelaskan berbagai metrik yang digunakan saat mendiskusikan karakteristik sensor LiDAR dan cara memahami informasi yang seringkali diberikan oleh produsen sensor LiDAR secara berlebihan. Informasi ini disediakan agar pelanggan kami memiliki visi yang jelas dalam memilih sensor LiDAR yang optimal untuk produk Geo-MMS mereka.
Blog ini melengkapi blog kami sebelumnya. Memilih Sensor LiDAR yang Tepat untuk Drone Anda, meskipun informasi yang disajikan di sini menawarkan beberapa pembaruan, seiring dengan perkembangan teknologi LiDAR. Dalam studi ini, kami akan mengkaji beberapa sensor LiDAR yang didukung oleh Rangkaian Produk , termasuk sensor dari Teledyne Optech, Quanergy, dan Velodyne.
Light Detection and Ranging (LiDAR) hanyalah salah satu jenis teknologi pengukuran jangkauan aktif. Teknologi jangkauan aktif lainnya seperti sonar dan radar masing-masing menggunakan gelombang suara dan radio sebagai metode penginderaannya, sementara LiDAR menggunakan sinar laser dengan panjang gelombang pendek untuk mengukur jarak antara sensor dan objek yang terdeteksi.
![]()
Figure 1. Typical Geo-MMS Point&Pixel system in flight
Points Per Second
Points per Second (PPS )adalah salah satu metrik terbaik untuk mengukur kinerja sistem LiDAR, karena metrik ini mengalikan tiga metrik secara bersamaan: titik vertikal, titik horizontal, dan kecepatan bingkai; dijelaskan masing-masing di sini.
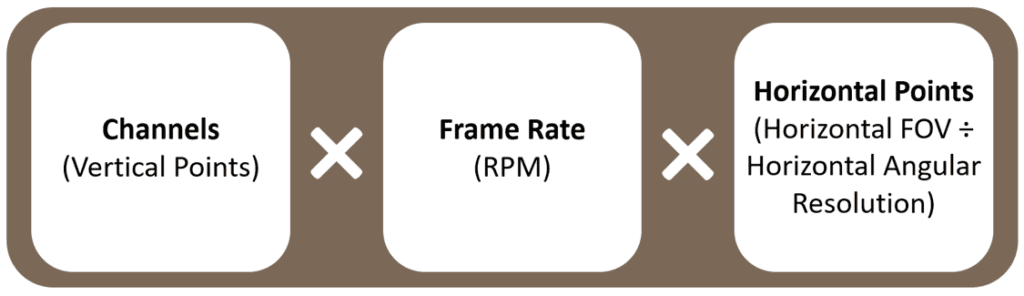
Figure 2. Calculation of Points per Second emitted by spinning analog LiDAR sensors.
- Saluran atau ‘titik vertikal’ sensor LiDAR adalah jumlah sinar laser yang tidak berubah, bergantung pada sensornya (dan sering kali ditunjukkan dalam nama sensor, misalnya M8, VLP-16, dll.)
- Frame rate adalah kecepatan putaran sensor (dinyatakan sebagai frekuensi, Hz)
- ‘Titik horizontal’ dapat dihitung dengan membagi bidang pandang horizontal (FOV) dengan resolusi sudut horizontal
- Resolusi sudut dan kecepatan bingkai biasanya disediakan sebagai rentang dalam lembar data sensor. Resolusi sudut yang lebih rendah menunjukkan kecepatan bingkai yang lebih pendek, sedangkan resolusi sudut yang lebih tinggi menunjukkan kecepatan bingkai yang lebih tinggi.
Frame Rate dan horizontal Point memiliki trade-off tetapi dapat dikonfigurasi secara independen. Lihat di bawah contoh dari sensor Quanergy M8 Ultra LiDAR.

Table 1. PPS calculation for the Quanergy M8 Ultra LiDAR.
Perhitungan dan metrik ini relevan untuk sensor LiDAR pemintalan analog, seperti model Velodyne dan Quanergy yang terintegrasi dengan Geodetics. Untuk informasi lebih lanjut mengenai pemindaian raster laser tunggal sistem LiDAR, silakan merujuk ke bagian akhir blog ini.
Returns
Setiap pulsa LiDAR akan dipantulkan pada banyak objek dengan sifat reflektifitas berbeda pada misi UAV-LiDAR pada umumnya. Pulsa laser yang dipancarkan yang bertemu dengan beberapa permukaan pantulan saat bergerak menuju fitur target dibagi menjadi beberapa pantulan sebanyak permukaan reflektif. Pengembalian pertama adalah yang paling signifikan dan dikaitkan dengan fitur tertinggi dalam lanskap seperti puncak pohon atau permukaan jalan. Pengembalian berganda mampu mendeteksi ketinggian beberapa objek dalam jejak laser dari pulsa laser yang keluar.
Untuk setiap pengembalian yang mampu ditangkap oleh sensor LiDAR, jumlah titik yang sebenarnya dipantulkan dalam setiap pengembalian berkurang secara signifikan. Sebagian besar poin dalam sistem LiDAR mana pun akan ditangkap pada pengembalian pertama. Produsen yang mengalikan nilai PPS mereka dengan jumlah pengembalian maksimal memberikan informasi yang menyesatkan. Kemampuan pengembalian LiDAR penting untuk aplikasi tertentu, namun nilainya tidak boleh dilebih-lebihkan. Ketika memetakan wilayah perkotaan yang sebagian besar terdiri dari atap bangunan dan jalan, keuntungan tambahan hanya memberikan sedikit manfaat. Pengembalian berganda (multiple return) memang menawarkan keuntungan ketika beroperasi di kawasan bervegetasi, karena pengembalian yang berbeda menembus vegetasi untuk menangkap pengukuran titik tanah yang akurat dan padat di bawah kawasan berhutan atau bervegetasi – sesuatu yang pada dasarnya kurang dalam fotogrametri.
Kesimpulan: Pengembalian berganda tidak meningkatkan PPS Anda secara linier dengan jumlah pengembalian yang mungkin. Pengembalian aktual didasarkan pada reflektansi objek.
Sensor Type | Beam Divergence
Opsi Geodetics LiDAR jarak jauh mengintegrasikan sensor LiDAR pemindaian raster yang memiliki arsitektur sensor berbeda dibandingkan dengan sensor berputar yang disebutkan di atas. Sensor ini menggunakan laser tunggal dan cermin yang berosilasi secara mekanis. Poin per detik adalah fungsi dari kecepatan pemindaian (osilasi cermin) dan Frekuensi Pengulangan Pulsa (PRF). Teledyne Optech CL-360 adalah laser LiDAR tunggal, sedangkan kecepatan bingkai dinyatakan dalam bentuk Frekuensi Pengulangan Pulsa (PRF) – jumlah sinyal pulsa berulang dalam satuan waktu tertentu, diukur dalam pulsa per detik.
Divergensi sinar mewakili penyimpangan foton dari satu sinar yang dipancarkan oleh sensor LiDAR. Karena setiap pulsa laser dipancarkan dalam bentuk kerucut, intensitas pulsa laser berkurang secara eksponensial seiring jarak. Ini adalah salah satu area di mana sistem pemindaian raster memiliki keunggulan tersendiri. Divergensi sinar untuk Teledyne Optech CL-360 adalah 0,3mrad, sedangkan sensor berputar menyimpangkan energi laser sebesar ~3mrad. Karena jumlah total energi pulsa tetap konstan terlepas dari divergensi berkas, divergensi berkas yang lebih besar menyebabkan energi pulsa tersebar di area yang lebih luas, sehingga menghasilkan rasio signal-to-noise yang lebih rendah. Ini adalah bagian dari alasan rekomendasi untuk terbang dengan AGL rendah untuk misi UAV-LiDAR.
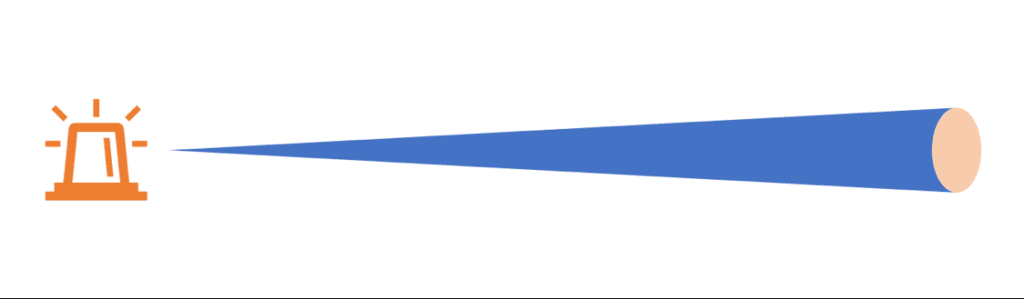
Figure 4. Figure displaying the beam divergence of a laser pulse as it is emitted from a sensor.